
This content originally appeared on HackerNoon and was authored by The Tech Reckoning is Upon Us!
Table of Links
IV. Conclusion and Future Works, and References
III. EXPERIMENTAL RESULTS
The system consists of a consumer-grade IMU mounted on the heel of the shoe (as shown in Fig.3) with the transmission speed at 100 Hz via wireless mode to the laptop for logging and real-time visualization. The IMU named Mtw Awinda contains 3-axis MEMS accelerometer, 3-axis MEMS gyroscope and 3-axis MEMS magnetometer. The parameters in detail can be found in the website of Xsens company. Several experiments were performed to access the performance of the proposed methodology.
\ A. Walking in the Hard Magnetic Disturbance Field
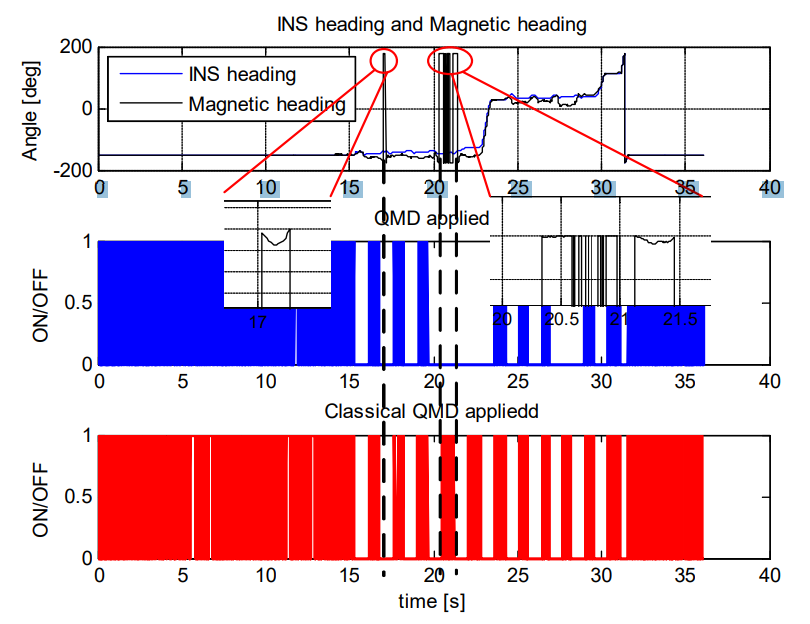
\ In this case, a pedestrian walks along the corridor with the magnet placed on the floor as shown in Fig.5. The red circles in Fig.6 indicates that the hard magnetic disturbance happens due to the wrong magnetic heading while the INS heading keeps stable. Owing to the characteristic of the magnet, the magnetic field intensity near it is constant. Accordingly, from the zoomed drawing in Fig.6, the magnetic headings stay stable but wrong. The proposed QMD algorithm contributes to a right detection results compared with the classical QMD method and has a better performance.

B. Walking in Real Indoor Environment
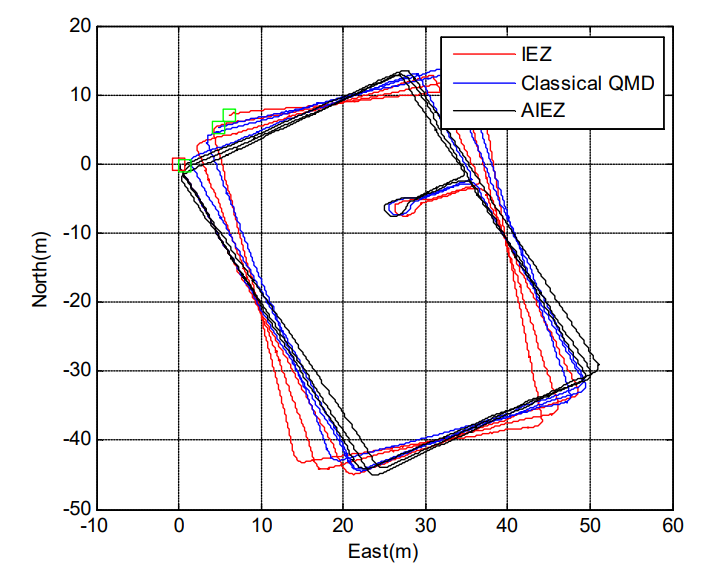
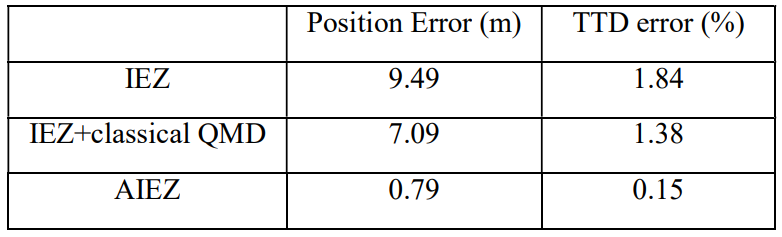
\ In this case, we walked along the regular trajectory for three cycles for 7 minutes in the teaching building 26 in Tianjin University. The total distance of the first trajectory is about 515.5 meters. We evaluate the performance among the IEZ, IEZ+classical QMD and AIEZ (as shown in Fig.7) and logged the Total Travelled Distance (TTD) error in Table I.
\
IV. CONCLUSION AND FUTURE WORKS
In this paper, QMD was implemented to combine the EC algorithm and the HDR algorithm in order to achieve complementation between them. Classical QMD algorithm fails to recognize the hard magnetic field and mistakes it for pure magnetic field. Our proposed QMD method captures the moment when the magnetic field intensity is stable and the magnetic heading is similar to the INS heading. Hence, it have a better performance than classical QMD. AIEZ framework fuses the EC and HDR algorithm and is superior to IEZ and IEZ+classical QMD frameworks. In the future, plenty of experiments need to be settled to evaluate the performance of QMD detector and AIEZ framework.
REFERENCES
[1] Harle, Robert. "A Survey of Indoor Inertial Positioning Systems for Pedestrians." IEEE Communications Surveys and Tutorials 15.3 (2013): 1281-1293.
\ [2] Qian, Jiuchao, et al. "An improved indoor localization method using smartphone inertial sensors." Indoor Positioning and Indoor Navigation (IPIN), 2013 International Conference on. IEEE, 2013.
\ [3] Patarot, Alexandre, et al. "Belt mounted IMU with enhanced distance estimation for pedestrian indoor positioning." Indoor Positioning and Indoor Navigation (IPIN), 2013 International Conference on. IEEE, 2013.
\ [4] Patarot, Alexandre, et al. "Belt mounted IMU with enhanced distance estimation for pedestrian indoor positioning." Indoor Positioning and Indoor Navigation (IPIN), 2013 International Conference on. IEEE, 2013.
\ [5] Nilsson, John-Olof, et al. "Foot-mounted INS for everybody-an opensource embedded implementation." Position Location and Navigation Symposium (PLANS), 2012 IEEE/ION. IEEE, 2012.
\ [6] Jiménez, Antonio Ramón, et al. "Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU." Positioning Navigation and Communication (WPNC), 2010 7th Workshop on. IEEE, 2010.
\ [7] Fischer, Carl, Poorna Talkad Sukumar, and Mike Hazas. "Tutorial: Implementing a pedestrian tracker using inertial sensors." IEEE pervasive computing 12.2 (2013): 17-27.
\ [8] Liu, Yu, et al. "Step length estimation based on D-ZUPT for pedestrian dead-reckoning system." Electronics Letters 52.11 (2016): 923-924.
\ [9] Angermann, Michael, et al. "Characterization of the indoor magnetic field for applications in localization and mapping." Indoor Positioning and Indoor Navigation (IPIN), 2012 International Conference on. IEEE, 2012.
\ [10] Ladetto, Quentin, and Bertrand Merminod. "Digital magnetic compass and gyroscope integration for pedestrian navigation." 9th international conference on integrated navigation systems, StPetersburg. 2002.
\ [11] Afzal, Muhammad Haris, Valérie Renaudin, and Gérard Lachapelle. "Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation." Sensors 11.12 (2011): 11390- 11414.
\ [12] Jimenez, Antonio R., et al. "A comparison of pedestrian deadreckoning algorithms using a low-cost MEMS IMU." Intelligent Signal Processing, 2009. WISP 2009. IEEE International Symposium on. IEEE, 2009.
\ [13] Bebek, Özkan, et al. "Personal navigation via high-resolution gaitcorrected inertial measurement units." IEEE Transactions on Instrumentation and Measurement 59.11 (2010): 3018-3027.
\ [14] Skog, Isaac, et al. "Zero-velocity detection—An algorithm evaluation." IEEE Transactions on Biomedical Engineering 57.11 (2010): 2657-2666.
\ [15] Norrdine, Abdelmoumen, Zakaria Kasmi, and Jörg Blankenbach. "Step Detection for ZUPT-Aided Inertial Pedestrian Navigation System Using Foot-Mounted Permanent Magnet." IEEE Sensors Journal 16.17 (2016): 6766-6773.
\ [16] Kay, Steven M. Fundamentals of statistical signal processing. Prentice Hall PTR, 1993.
\
:::info Authors:
(1) Liqiang Zhang, School of Microelectronics, Tianjin University Tianjin, China;
(2) Kai Guo, School of Microelectronics, Tianjin University Tianjin, China;
(3) Yu Liu, School of Microelectronics, Tianjin University Tianjin, China.
:::
:::info This paper is available on arxiv under ATTRIBUTION-NONCOMMERCIAL-NODERIVS 4.0 INTERNATIONAL license.
:::
\
This content originally appeared on HackerNoon and was authored by The Tech Reckoning is Upon Us!
The Tech Reckoning is Upon Us! | Sciencx (2025-08-05T10:48:47+00:00) Improving Indoor Pedestrian Navigation Using Enhanced QMD and AIEZ Frameworks. Retrieved from https://www.scien.cx/2025/08/05/improving-indoor-pedestrian-navigation-using-enhanced-qmd-and-aiez-frameworks/
Please log in to upload a file.
There are no updates yet.
Click the Upload button above to add an update.